
Nieuwe kunstmatige spieren: lichtere, veiligere en robuustere robots
Uit studies aan de Polytechnische Universiteit van Zürich, een technologie voor spiergroepen die meer op die van mensen lijkt en gevoeliger is voor interacties met de omgeving
Onderzoekers van ETH Zürich hebben onlangs kunstmatige spieren ontwikkeld voor robotbewegingen, maar hun oplossing biedt verschillende voordelen ten opzichte van eerder geziene technologieën.
Het is de moeite waard om verder te bestuderen en kan worden gebruikt in alle gevallen waarin robots zacht moeten zijn in plaats van stijf of gevoeliger moeten zijn in de interactie met de omgeving.
Veel robotici dromen ervan robots te bouwen die niet alleen een combinatie zijn van metaal of andere harde materialen en motoren, maar ook zachter en beter aanpasbaar zijn.
‘Zachte’ automaten kunnen op een heel andere manier met de omgeving omgaan; Ze kunnen bijvoorbeeld schokken opvangen zoals menselijke ledematen dat doen, of een voorwerp subtiel vastpakken.
Dit zou ook voordelen bieden op het gebied van energieverbruik: tegenwoordig vergt de beweging van robots doorgaans veel energie om een positie langdurig vast te houden, terwijl zachte systemen deze beter zouden kunnen opslaan.
Wat ligt er dus meer voor de hand dan de menselijke spieren als model te nemen en deze opnieuw te creëren?
Tot ziens, NCCR Robotics: Twaalf volle jaren in dienst van Zwitserland
Er is een drone die in bomen "klimt" om ze te beschermen

Elke natuurlijke spier trekt zich ook samen als reactie op een voldoende elektrische impuls
De werking van kunstmatige spieren is noodzakelijkerwijs gebaseerd op biologie.
Net als hun natuurlijke tegenhangers trekken kunstmatige spieren samen als reactie op een elektrische impuls.
Kunstspieren bestaan echter niet uit cellen en vezels, maar uit een zak gevuld met een vloeistof (meestal olie), waarvan het omhulsel gedeeltelijk bedekt is met elektroden.
Wanneer deze elektroden een elektrische spanning ontvangen, komen ze samen en duwen de vloeistof in de rest van de zak, die buigt en daardoor een gewicht kan tillen.
Een enkele zak is analoog aan een korte bundel spiervezels.
Meerdere van deze zakken kunnen met elkaar worden verbonden om een compleet voortstuwingselement te vormen, dat ook wel een actuator of, eenvoudiger gezegd, een kunstmatige spier wordt genoemd.
Onderscheiding voor ProteusDrone, de zachte robot met gemuteerde vormen
Een robothond: de Zwitserse uitvinding geïnspireerd op de dierenbiologie
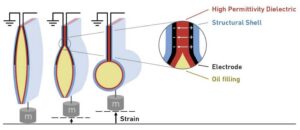
(Illustratie: Gravert et al/Science/ETH Zürich)
Oorspronkelijk hadden elektrostatische actuatoren een spanning van 6.000 tot 10.000 volt nodig
Het idee om kunstmatige spieren te ontwikkelen is niet nieuw, maar tot nu toe was er een groot obstakel voor de realisatie ervan: elektrostatische actuatoren werkten alleen met extreem hoge spanningen, van zo’n 6.000 tot 10.000 volt.
Deze eis had verschillende gevolgen: zo moesten de spieren worden aangesloten op grote, zwaarspanningsversterkers, werkten ze niet in water en waren ze niet geheel veilig voor de mens.
Inmiddels is er een nieuwe oplossing ontwikkeld door Robert Katzschmann, hoogleraar robotica aan de ETH Zürich, samen met Stephan-Daniel Gravert, Elia Varini en andere collega's.
Zij publiceerden een artikel over hun versie van een kunstspier, die feitelijk meerdere voordelen biedt, in een artikel op de informatiewebsite ‘Science Advances’.
Stephan-Daniel Gravert, die als wetenschappelijk assistent in het laboratorium van Robert Katzschmann werkt, ontwierp een nieuwe schaal voor de tas.
Een nieuwe Anglo-Zwitserse blusdrone om brandweerlieden te helpen
Zo "leren" robots in Zwitserland de geheimen van trekking

(Foto: Gravert e.a., Wetenschap, 2024)
De oplossing voor de toekomst? Tegenwoordig is het afkomstig van ferro-elektrisch materiaal met een hoge permeabiliteit
De onderzoekers noemen de nieuwe kunstspieren HALVE-actuators, waarbij HALVE staat voor “Hydraulically Amplified Low-Voltage Electrostatic”.
“Bij andere actuatoren bevinden de elektroden zich aan de buitenkant van de schaal. Bij ons bestaat de schaal uit verschillende lagen. We namen een ferro-elektrisch materiaal met een hoge permeabiliteit, dat wil zeggen dat in staat is relatief grote hoeveelheden elektrische energie op te slaan, en combineerden dit met een laag elektroden. Vervolgens hebben we alles gecoat met een polymeer omhulsel dat uitstekende mechanische eigenschappen heeft en de tas stabieler maakt.”hij legt uit.
Op deze manier konden de onderzoekers de benodigde spanning verlagen, omdat dankzij de veel hogere permittiviteit van het ferro-elektrische materiaal ondanks de lage spanning grote krachten kunnen worden bereikt.
Stephan-Daniel Gravert en Elia Varini ontwikkelden niet alleen samen de schil van de HALVE-actuators, maar bouwden de actuatoren ook zelf in het laboratorium voor gebruik in twee specifieke robots.
In Tel Aviv een Enel-laboratorium over het gebruik van AI en robotica in energie
Zo kan de Atlas-robot al met ons werken en communiceren
(Foto: videoscreenshot door Gravert et al, Science, 2024)
Technische ‘tangen’ en ‘vissen’ laten zien wat de in Zwitserland ontworpen spier kan doen
Een voorbeeld van een robot is een grijper van 11 centimeter hoog en met twee vingers.
Elke vinger wordt bewogen door drie in serie geschakelde vakken van de HALVE-actuator.
Een kleine batterijvoeding voorziet de robot van 900 Volt.
Samen wegen de batterij en voeding slechts 15 gram.
De gehele remklauw, inclusief de vermogens- en besturingselektronica, weegt 45.
De grijper kan een glad plastic voorwerp met voldoende kracht vastgrijpen om zijn eigen gewicht te dragen wanneer het voorwerp met een touw de lucht in wordt getild.
“Dit voorbeeld laat uitstekend zien hoe klein, licht en efficiënt HALVE-actuators zijn. Het betekent ook dat we een enorme stap hebben gezet in de richting van ons doel: het creëren van geïntegreerde spieraangedreven systemen.", zegt Katzschmann tevreden.
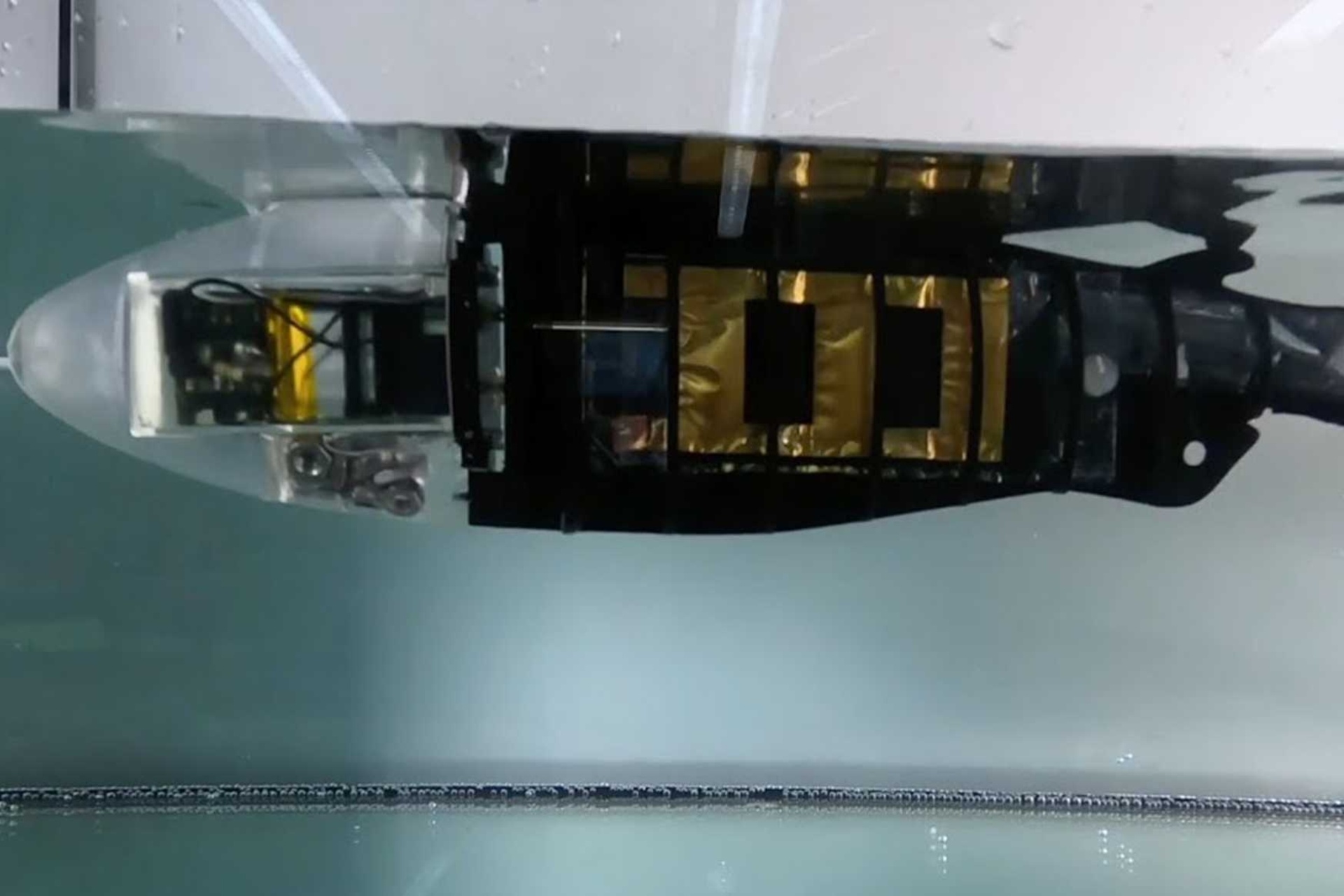
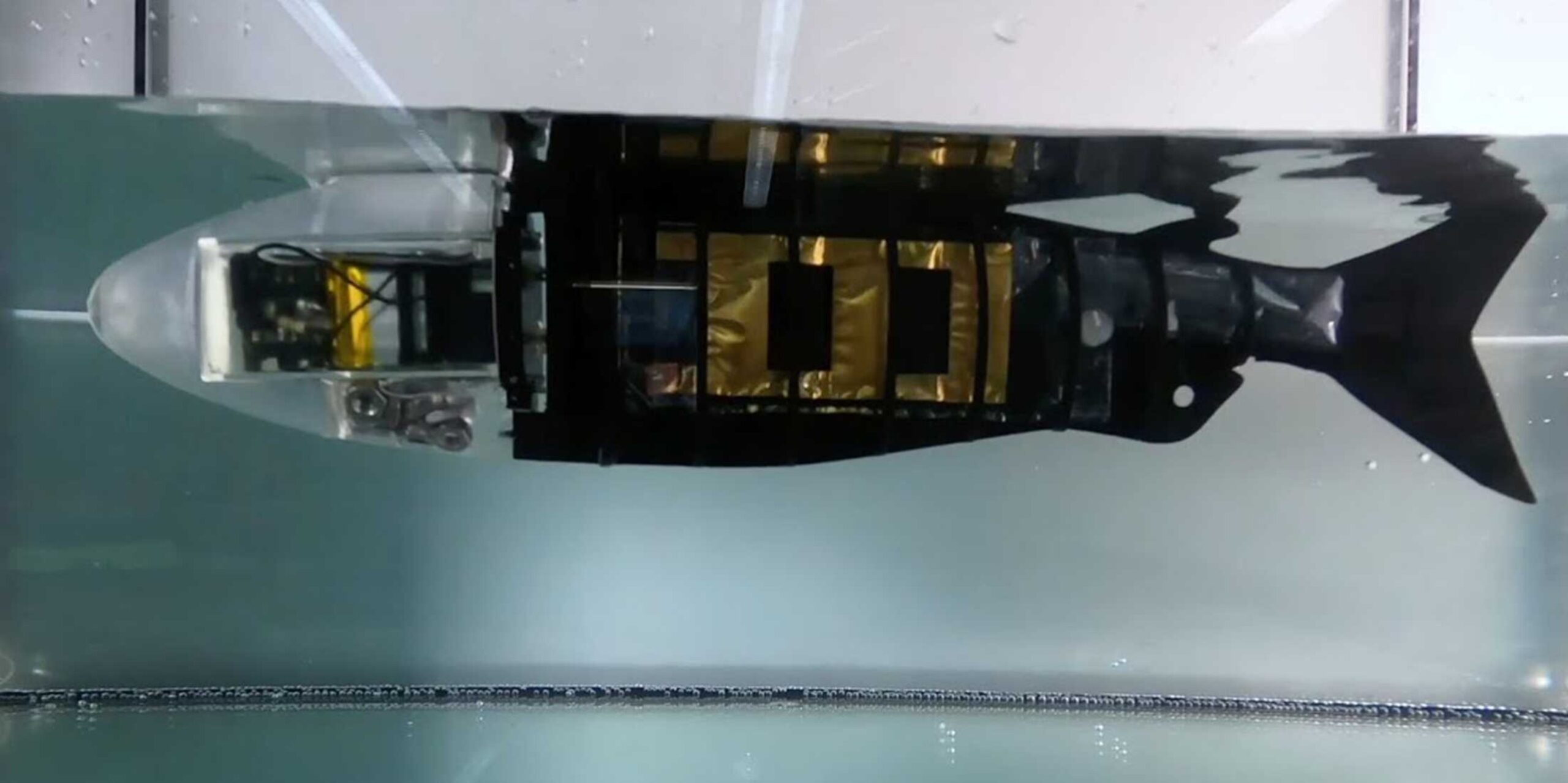
Het tweede object is een visachtige zwemmer, bijna 30 centimeter lang, die zich gemakkelijk in het water kan bewegen.
Het bestaat uit een "kop" die de elektronica bevat en een flexibel "lichaam", waaraan de "Hydraulically Amplified Low-Voltage Electrostatic" actuatoren zijn bevestigd.
Deze actuatoren bewegen afwisselend in een ritme dat de typische zwembeweging produceert.
De autonome vis kan vanuit stilstand met een snelheid van drie centimeter per seconde in 14 seconden overgaan, en dit alles ondergedompeld in gewoon kraanwater.
Een robothond: de Zwitserse uitvinding geïnspireerd op de dierenbiologie
In Zwitserland de Federale Hogescholen voor transparante en betrouwbare AI

De nieuwe actuatoren zijn veel robuuster dan andere kunstmatige spieren en ook waterdicht
Dit tweede voorbeeld is belangrijk omdat het een ander nieuw kenmerk van HALVE-actuatoren demonstreert.
Omdat de elektroden niet langer buiten de schaal worden beschermd, zijn de kunstspieren nu waterdicht en kunnen ze zelfs worden gebruikt ondergedompeld in geleidende vloeistoffen.
“De vis illustreert een algemeen voordeel van deze actuatoren: de elektroden worden beschermd tegen de externe omgeving en omgekeerd wordt de omgeving beschermd door de elektroden. Je kunt deze elektrostatische actuatoren dus bijvoorbeeld in water gebruiken of aanraken.”, voegt de professor van het Federale Instituut voor Technologie in Zürich toe.
De gelaagde structuur van de omhulsels heeft nog een ander voordeel: de nieuwe actuatoren zijn veel robuuster dan andere kunstmatige spieren.
Idealiter zouden enveloppen veel beweging moeten kunnen maken, en dat ook snel.
Maar zelfs de kleinste fabricagefout, zoals een stofje tussen de elektroden, kan leiden tot een elektrische storing, een soort ‘mini-blikseminslag’.
Op 4 november in Lausanne de "Swiss Robotics Day"
Met de DroneHub een ongekende… “volière” voor drone-onderzoek

“Minibliksem”-problemen opgelost, bedrijven klaar voor grootschalige productie
“Toen dit bij eerdere modellen gebeurde, brandde de elektrode door, waardoor er een gat in de schaal ontstond. Hierdoor kon de vloeistof ontsnappen en werd de actuator onbruikbaar”, legt Stephan-Daniel Gravert uit.
Dit probleem is bij HALVE-actuators opgelost omdat één enkel gat zichzelf in essentie sluit, dankzij de beschermende buitenste plastic laag.
Hierdoor blijft de behuizing volledig functioneel, zelfs na een elektrische storing.
De twee onderzoekers zijn duidelijk blij dat ze een beslissende doorbraak hebben bereikt in de ontwikkeling van kunstspieren, maar ze zijn ook realistisch.
Zoals Robert Katzschmann zegt: “Nu moeten we deze technologie klaarmaken voor grootschalige productie, en dat kunnen we hier in het ETH-laboratorium niet doen. Zonder al te veel onthullingen te doen, kan ik zeggen dat we al interesse tonen van bedrijven die graag met ons willen samenwerken."
Kunstspieren zouden bijvoorbeeld op een dag kunnen worden gebruikt in nieuwe robots, protheses of draagbare apparaten.
Met andere woorden, in technologieën voor gebruik in en op het menselijk lichaam…
Een framboos gemaakt van...siliconen om robots te instrueren om te oogsten
Het juiste eerbetoon van Lugano aan het jonge Smilebots-roboticateam



Onbeperkte grijper, aangedreven door HALVE actuatoren, die een blok PLA vastgrijpt
Ongebonden kunstmatige vis, aangedreven door HALVE actuatoren, in kraanwater
Mogelijk bent u ook geïnteresseerd in:

In Alto Adige is EDIH NOI tegenwoordig het nieuwe referentiepunt voor AI
In Bolzano wordt 4,6 miljoen euro uit het PNRR-fonds toegewezen voor diensten aan lokale bedrijven op het gebied van de digitalisering van inlichtingen…
Oostenrijk, Duitsland en Zwitserland voor "meer innovatieve" goederenspoorwegen
DACH-ministers Leonore Gewessler, Volker Wissing en Albert Rösti: de introductie van Digital Automatic Pairing is een sleutelelement

Overtuiging of manipulatie? Ontstaan en historische impact van PR
Dit is hoe Public Relations, van de verfijnde dialoog van het oude Griekenland tot het huidige digitale tijdperk, voortdurende innovatie blijft bieden

Jongeren en cryptocurrencies: hoe kom je meer te weten over Bitcoin…
Kinderen kennis laten maken met digitale valuta en Blockchain kan een spannende onderneming zijn, gezien hun affiniteit met technologie en innovatie

 //
//